

多模式智能按摩机器人系统设计
“优秀设计”一等奖资助企业:
 上海念通医疗科技有限公司
上海念通医疗科技有限公司
企业导师: 华磊

指导教师: 盛鑫军
项目成员: 耿梓航,何钢,胡文康,于景瑶
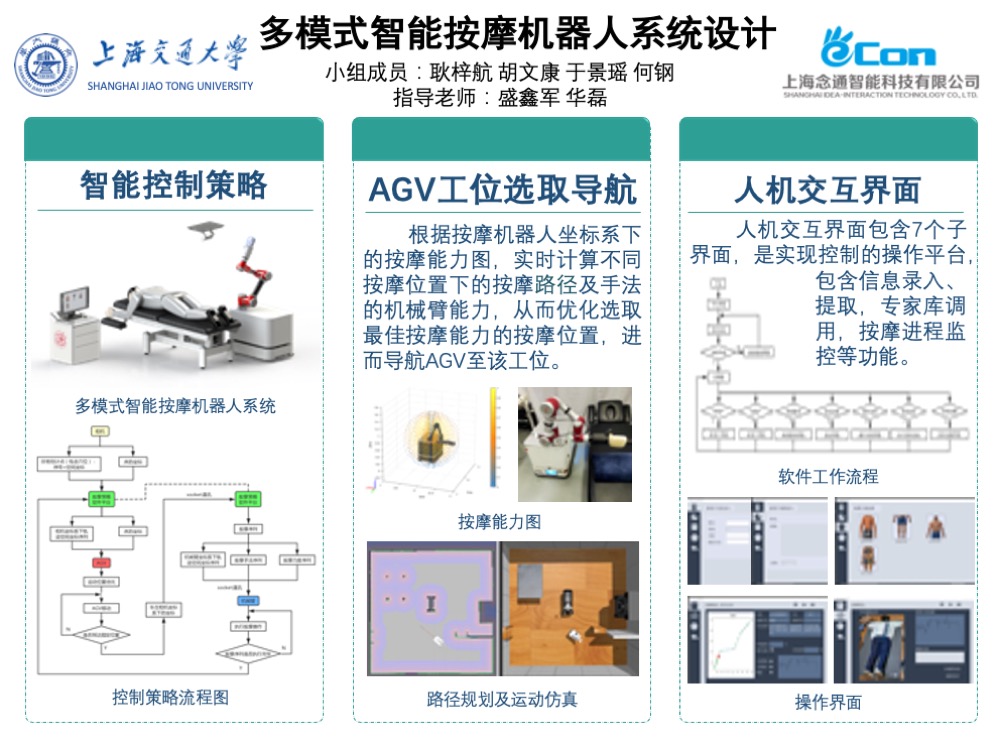
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
目前中医按摩市场需求庞大,但专业中医按摩师非常紧缺,已有的按摩器械由于缺乏中医基础理论指导,存在设计不匹配人体生理结构以及难以识别穴位实施中医按摩手法等问题,大大限制了其临床疗效,也限制了中医特色和优势的发挥。本课题围绕模拟中医按摩的基础问题,在穴位自主定位和多模式中医按摩手法两方面形成技术突破,结合智能按摩策略以及AGV自主规划控制,设计制作能模拟人手按摩手法的多模式智能按摩机器人系统。
项目目标
总体目标是设计制作能模拟人手按摩手法的多模式智能按摩机器人系统,具体包括:建立人体主要穴位和特征器官的位置关系图谱,基于图像识别技术设计穴位自主定位系统;研发多功能按摩头,实现滚、揉、振、按等中医按摩手法;结合专家库设计智能按摩策略,针对不同需求规划按摩流程,设计人机交互界面;建立按摩机器人工作空间下的按摩能力图,完成AGV移动平台最佳按摩位置选取,路径规划及导航。
项目成果
初步完成多模式智能按摩机器人系统设计与制作,基于中医理论的指导,设计智能按摩策略,完成穴位实时识别、AGV最优按摩位置选择,实现多种中医手法的按摩,可以从很大程度上弥补市场中按摩器械的缺点。初步完成医师操作软件开发,方便医师对整个按摩机器人系统的了解和使用。




