

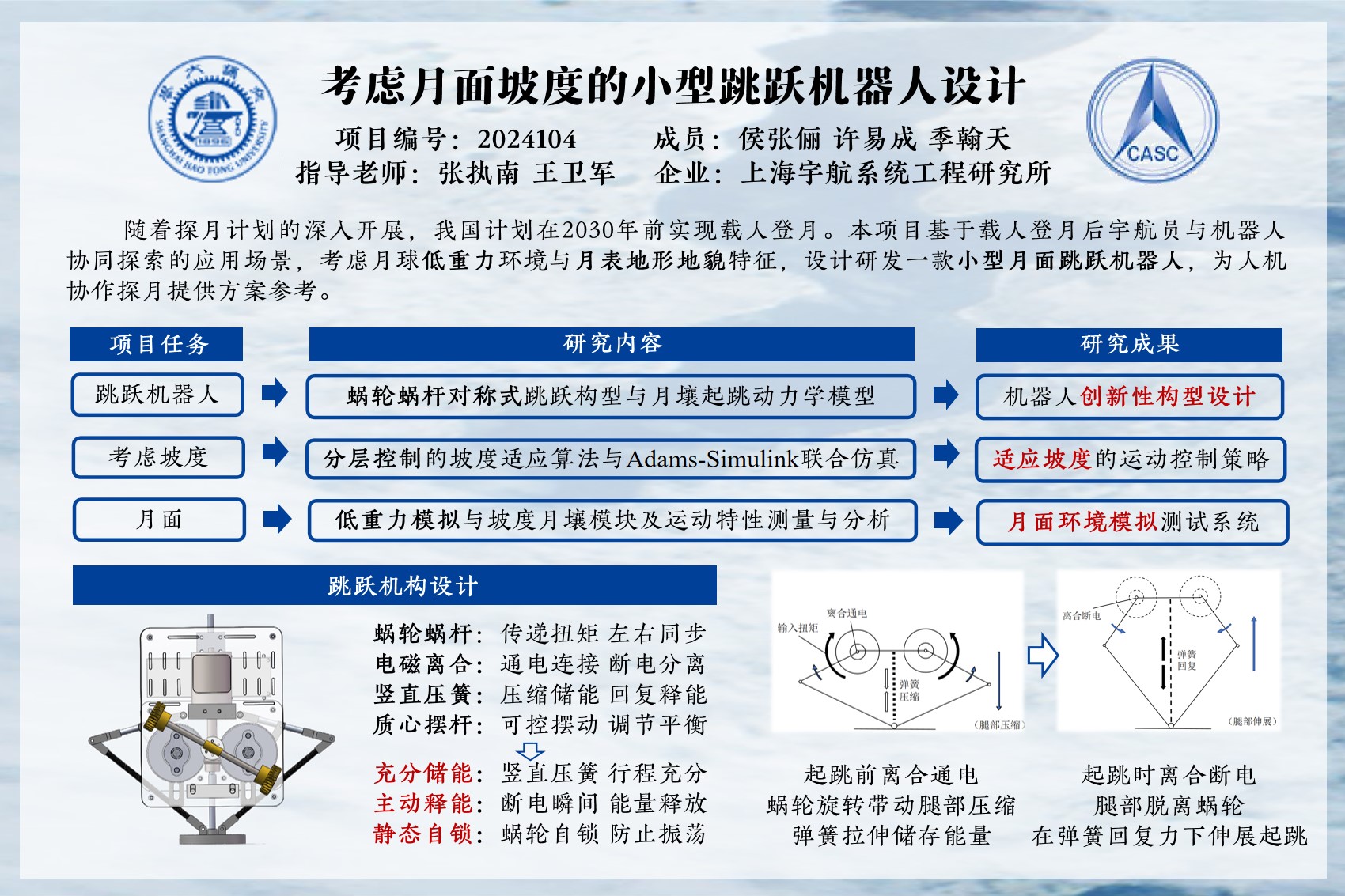
考虑月面坡度的小型跳跃机器人设计
“优秀设计”二等奖资助企业:
 上海宇航系统工程研究所
上海宇航系统工程研究所
企业导师: 王卫军

指导教师: 张执南
项目成员: 侯张俪 许易成 季翰天
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
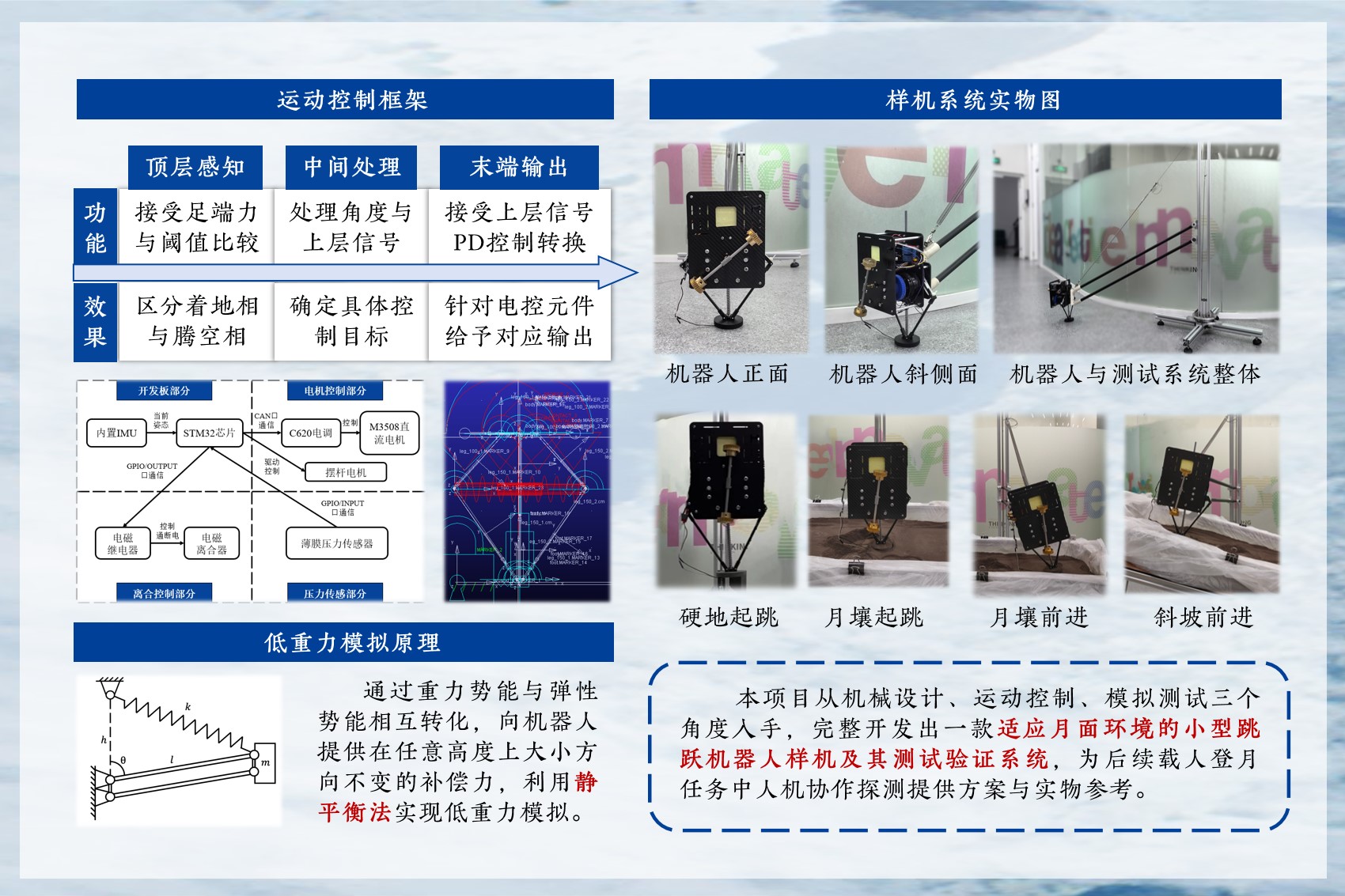
基于上海宇航系统工程研究所提出的研发一款适应月球表面探索的小型协作跳跃机器人的任务需求,聚焦其在平面内的运动实现,考虑低重力、松软月壤和坡度变化环境对机器人跳跃稳定性的影响,从机械设计、运动控制和模拟测试三个方面开展研究。提出小型跳跃机器人详细设计,针对月壤起跳进行动力学计算;结合分层控制算法和PID控制的驱动实现方式,开展Adams-Simulink联合仿真测试;设计并搭建低重力环境模拟系统与月壤坡度调节装置,开发实物样机并进行相关测试。
项目目标
考虑载人登月人机协作的任务背景,创新性研发一款适应于月球重力和月面地形地貌的小型跳跃机器人,并满足相关设计指标:控制机器人整机质量与空间尺寸在指定范围内;机器人在运动过程中能够适应低重力环境,并在月面重力环境下达到企业的跳跃高度指标;适应一定范围内的坡度变化,完成上下坡运动;满足月面承载力要求,可进行松软土壤上的可靠运动。经前期设计和仿真测试验证方案可行性,并最终开展实物试验与仿真结果互相印证。
项目成果
针对任务需求与项目难点,提出了小型跳跃机器人的创新性构型与月壤起跳动力学模型,制定了适应坡度变化的跳跃运动控制策略,开发了月面环境模拟测试平台。本项目将机械设计、运动控制、模拟测试有机结合,开发了小型跳跃机器人实物样机与配套的模拟测试系统,在低重力、坡度和松软土壤环境下开展跳跃实验,相应形成机器人机械设计图纸、坡度适应运动控制算法、测试系统设计图纸及机器人测试报告,为人机协作探月任务提供跳跃机器人构型及控制与测试方案参考。




