

面向机翼深腔多余物清除作业的软体机器人设计
“优秀设计”三等奖资助企业:
 海安上海交通大学智能装备研究院
海安上海交通大学智能装备研究院
企业导师: 杨立拥

指导教师: 陈飞飞
项目成员: 袁睿勇,李柳言,吴胜川
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
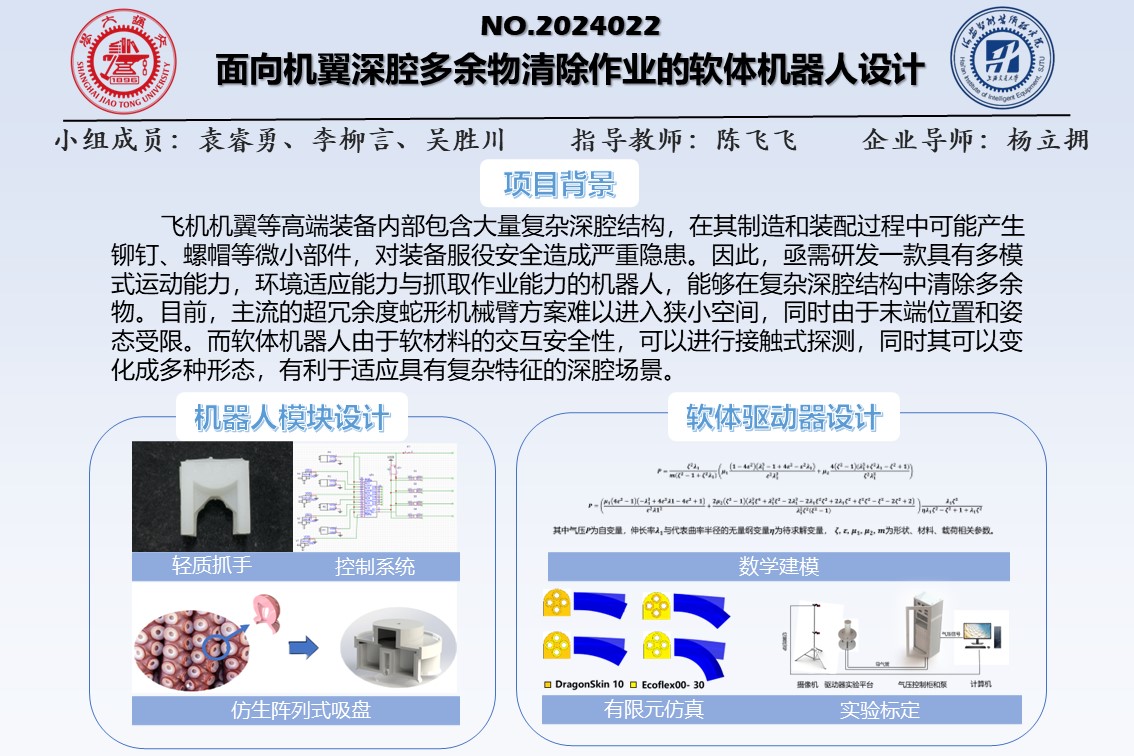
飞机机翼等高端装备内部包含大量复杂深腔结构,其制造和装配过程中可能产生的铆钉、螺帽等微小多余物将造成严重安全隐患。为此,亟待研发可用的深腔作业机器人,执行多场景环境约束下的清除任务。新兴的仿生软体机器人以其交互安全性和运动灵活性,有望解决该挑战。本项目围绕软体机器人的运动、抓取与控制,基于仿真和实验,设计软体驱动器、软体抓手与吸附单元,并开发气动控制系统进行协同控制,最终完成软体机器人的功能验证。
项目目标
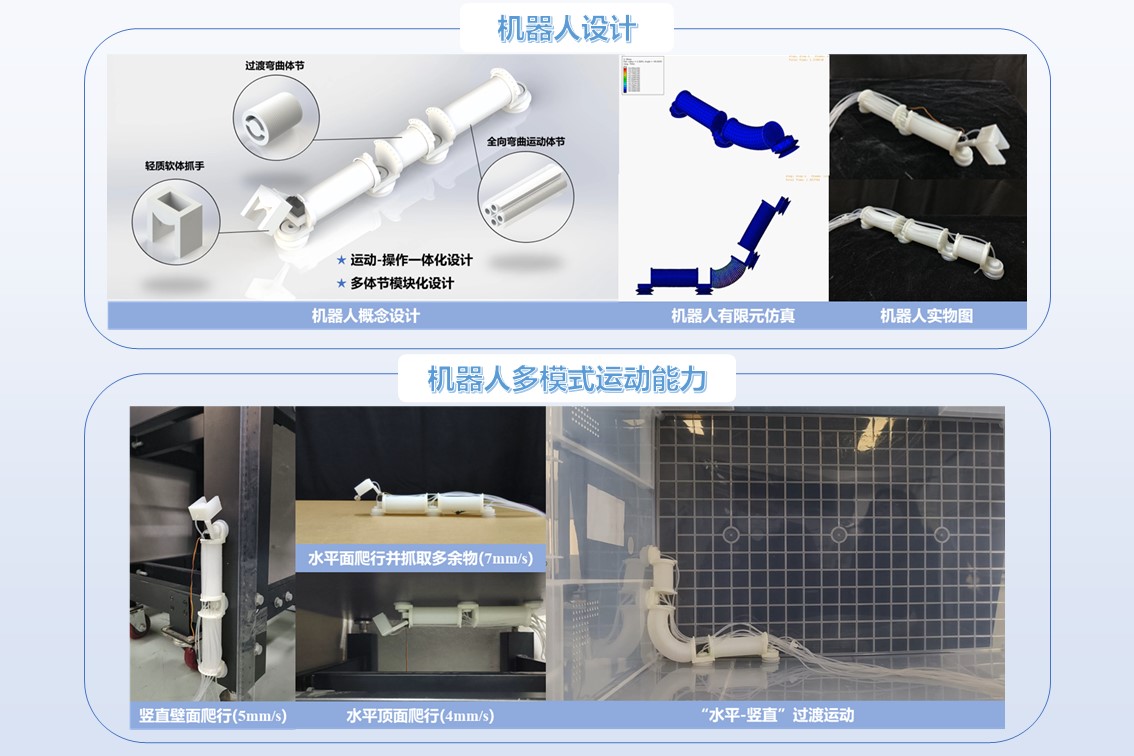
本项目拟设计一款软体机器人,执行复杂环境下多余物的清除作业。该软体机器人需具备多模式运动能力,包括进退、转向、俯仰、爬壁、吸顶等,以适应斜坡、障碍、壁面、顶面等场景特征。安装的软体抓手,需具备安全性和自适应性,以执行多余物的抓取。该软体机器人还需要便携的控制系统,能够向多条气路输入指定的正负气压,从而驱动软体机器人完成预期的动作。
项目成果
本项目对软体驱动器材料、形状、长度等设计参数提出了优化,创新了仿生阵列式吸盘,设计了一款软体机器人。该软体机器人展现出多模式运动能力,可以进行场景过渡,与软体抓手配合后,能够对非规则多余物进行抓取。本项目设计了相应的气路和电路,集成了气动控制系统,实现了对软体机器人的协同控制。经实验验证,该软体机器人成功执行了运动和抓取的任务。




