

爬壁式电梯按键机器人
最佳展示奖资助企业:
 无锡南方声学工程有限公司
无锡南方声学工程有限公司
企业导师: 王冉

指导教师: 陶建峰
项目成员: 张川、余宥灼、尹博尔
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
在公共场所中,电梯普遍安装与使用使得按钮成为了经常被人群接触的公共设施,存在引发交叉感染的风险;而现有的较优方案需对电梯内部电路进行改造,需要较多资金及较长安装周期。因此需要一种兼容性强,易安装拆卸,能简单、快速实现非接触按键的方案。
本项目设计了一款小型爬壁机器人,通过对总体框架、吸附模块、按键机构、电源系统等模块的设计与优化来达到轻量化目的,实现了通过语音或APP控制的非接触式按键,有效地避免在人群密集场所人与人之间的接触。
项目目标
本项目以执行电梯空间内的非接触式按键为目标,实现将语音或APP作为信号输入,通过超声波传感器判断机器人实时位置,到达对应的按键处完成按键操作,执行完毕后,机器人返回到初始位置,从电池包中获取电能。
该机器人采用永磁体吸附,可实现在电梯按键平面稳定移动,不发生脱落、偏离;同时做到方便安装,无需人接触情况下实现按键;需要噪音小、响应迅速、运动精准;对于不同的电梯构造可以通过模块化设计更换按键模块可以方便替换。
项目成果
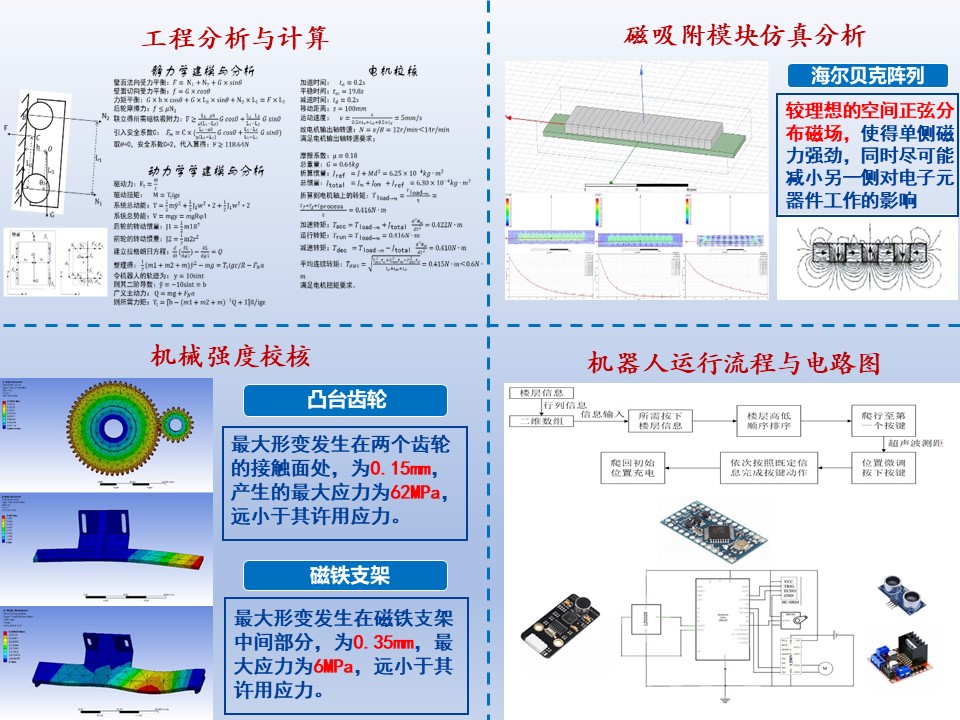
1、研发一套可独立于电梯自身系统之外的非接触式电梯按键机器人。机器人由总体框架、按键机构、运动机构、吸附模块、电源系统等组成。总体框架选用铝合金板作为材料,由板材拼装而成;按键机构则通过舵机带动凸轮轴转动,凸轮与轴心的距离差实现按键操作;运动机构使用减速电机通过齿轮传动带动后轮转动;吸附模块采用永磁体吸附,创新性地采用了海尔贝克阵列方式,使得爬壁稳定性及可靠性得到了极大地提升;电源系统采用了“双电池”模式,在减轻机器人主体重量的同时又能保证足够的续航。
2、研发了一套基于单片机的机器人控制系统,可以通过语音或APP作为信号输入,超声波传感器实现闭环控制,控制电机让机器人运动到所需楼层,通过舵机实现按键操作。




