

硬磁驱动血管介入机器人
机械工程资助企业:
 北京术锐技术有限公司
北京术锐技术有限公司
企业导师: 陈煜阳

指导教师: 徐凯
项目成员: 刘虹妤,夏乾骏,李睿
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
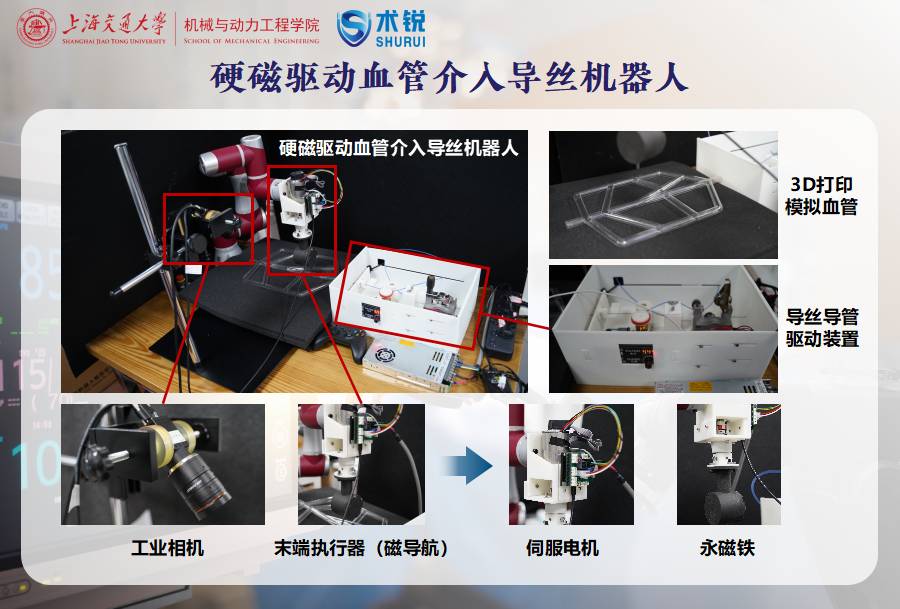
本项目设计并研发了一套基于硬磁驱动的微型导丝机器人系统,通过电机驱动控制导丝的推进与收回,通过机械臂控制永磁铁改变导丝运动方向,实现导丝导管在血管中的可控运动;基于视觉识别结果,对机械臂进行轨迹规划,实现机械臂与导丝机器人协同运动控制;通过研发基于机械臂控制的硬磁导丝机器人的软件平台,为使用者提供一个简洁直观、易于使用的控制界面。最后进行手术原理验证,测试导丝机器人在体外复杂腔道内运动,并能够应用于医学试验及手术过程。
项目目标
本项目期望提高血管介入机器人的自主性、运动精确度,同时完成闭环的跟踪控制,提高VIS手术成功率,降低医生的辐射暴露风险。具体体现为:设计硬磁导丝的结构,使其尖端具有硬磁性,能在机械臂控制磁铁引导下完成定向弯曲和定向行进目标;设计面向心血管介入手术场景的导丝导管驱动装置,实现导丝导管的独立双向驱动和在分叉血管中方向选择与导丝伸出动作;利用机器学习算法对导丝尖端进行图像识别,并基于识别结果对机械臂进行轨迹规划与实时控制,使机械臂平稳、快速地到达指定位姿。
项目成果
搭建了硬磁驱动的血管介入导丝机器人硬件与软件系统;建立了cosserat rod模型,计算在特定磁场下导丝的变形;识别血管范围并筛选最优路径;实现血管中导丝导管自主推进与收回;实现导丝导管在指定路径中自主转弯,进入岔路;实时检查导丝是否走入错误路径,如果走入错误路径,则退回修正,直到走入指定路径;实现系统的全过程自动化,无需人手操作;在紧急情况下可以使用手柄控制系统,对导丝运动进行干预。




