

矿山挖掘机智能化无人挖掘关键技术研究
机械工程资助企业:
 三一重机有限公司
三一重机有限公司
企业导师: 许奇楷

指导教师: 戚进
项目成员: 雷逸豪 孟歆尧
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
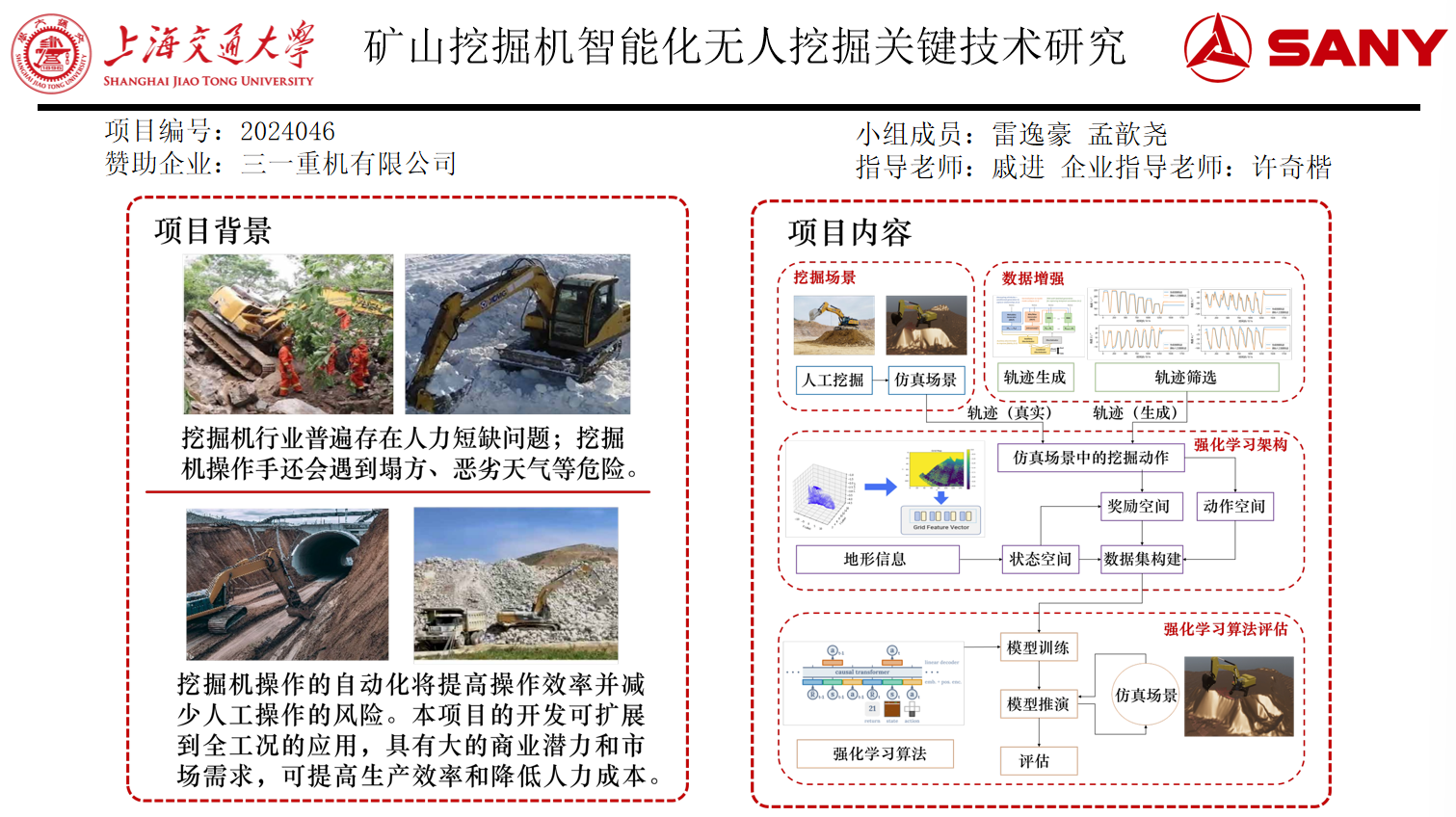
项目概述
随着自动化和人工智能技术的飞速发展,建筑机械行业正经历着重大变革。挖掘机作为建筑操作的关键设备,其自动化潜力巨大。然而,挖掘作业环境的多变和不可预测性,以及对精确处理的需求,使得自动化任务异常复杂。本项目题为矿山挖掘机智能化无人挖掘关键技术研究,旨在解决挖掘自动化中的复杂挑战。通过使用从真实场景收集的经验数据和基于Unity的仿真环境,训练和评估强化学习模型。项目整体架构包括数据收集、数据增强、数据制作及模型训练推演四部分。
项目目标
增强挖掘轨迹数据集:通过使用生成对抗网络(GAN)扩展真实世界轨迹数据集,解决数据稀缺问题,并提高模型的鲁棒性。
2地形信息集成:将地形信息转化为特征向量,融入到强化学习的状态空间中,从而支持基于地形的决策。
特定任务的强化学习评价:引入专门的评估指标,评估强化学习代理在实际挖掘任务中的表现,提供详细的效果分析。
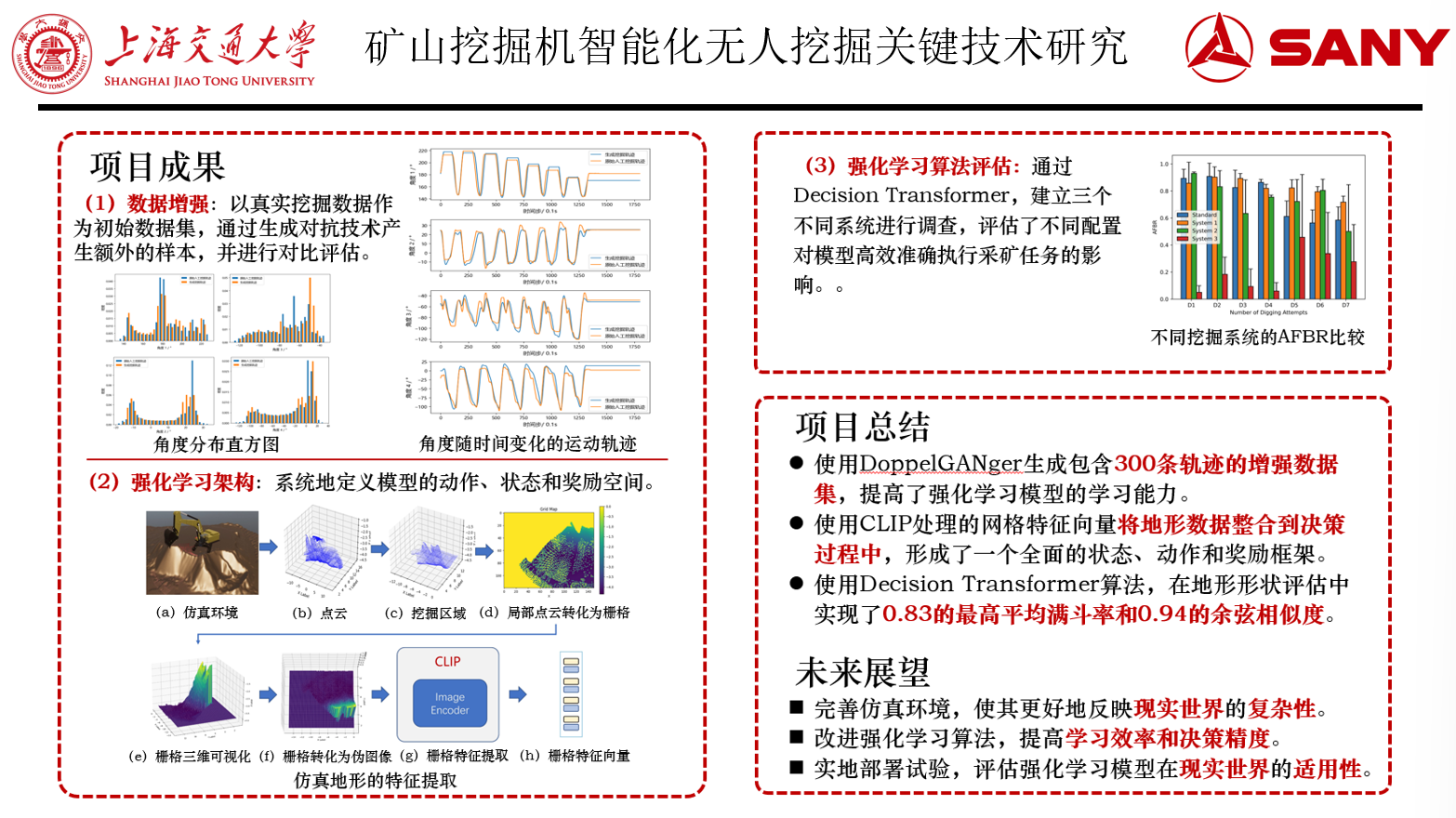
项目成果
本项目通过使用DoppelGANger生成包含300条轨迹的增强数据集,提高了强化学习模型的学习能力。使用CLIP处理的网格特征向量将地形数据整合到决策过程中,形成了一个全面的状态、动作和奖励框架。使用Decision Transformer算法,在地形形状评估中实现了0.83的最高平均满斗率和0.94的余弦相似度。此研究不仅提出了建筑机械自动化的新解决方案,还为在复杂环境中应用强化学习提供了新的视角。本项目强调了结合增强数据集和详细地形特征以提高挖掘自动化效率和可靠性的潜力,并为进一步研究提供了坚实的基础。




