

基于多模态感知的AMR定位与导航研究
机械工程资助企业: 上汽大众汽车有限公司
企业导师: 孟伟

指导教师: 曹其新
项目成员: 邵亦杨、严盛成、张梓欣
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
AMR是一种能够在没有人工干预的情况下自主执行任务的机器人。自主移动机器人在工业自动化、仓储物流等领域的应用日益广泛,其定位与导航技术的精准性和效率对其应用效果至关重要,在上汽大众等大规模工厂中,普遍存在用于物流系统的AMR以提高生产效率。
当前的应用于物流系统的AMR在技术上普遍依赖于固定导航点和标识,如基于射频识别技术(RFID)的导航与定位技术,和基于二维码+相机的导航与定位技术,在工作任务发生变化时,由于路线的不同,需要重新布置标识,费时费力,因此需要开发一套更灵活的自主导航与定位系统,以应对生产任务的变化。
项目目标
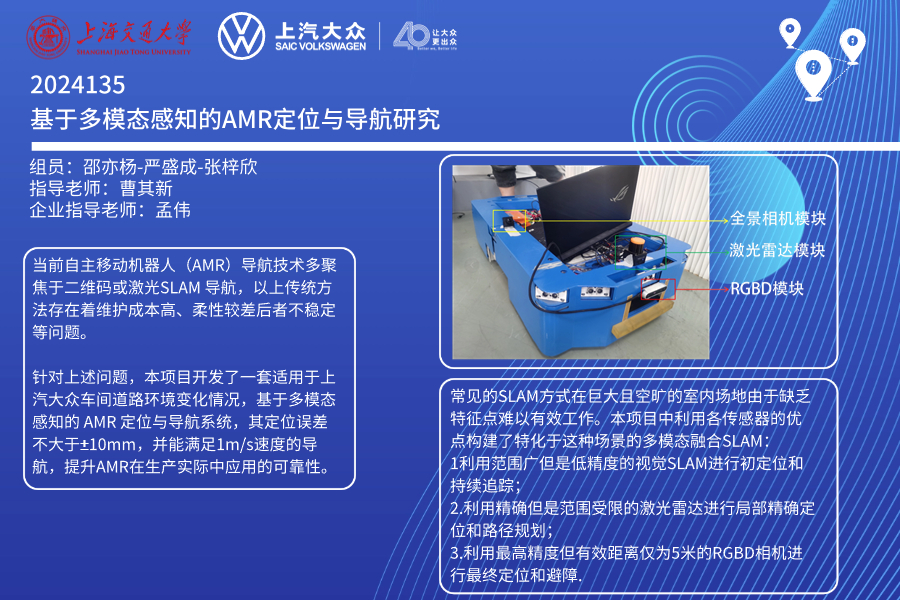
基于单个传感器的 SLAM 系统很难解决上汽大众工厂内车间规模极大,车间空旷,缺乏特征点和人员设备流动复杂的这些技术难点。因此本项目的研究目的在于针对上汽大众工厂内车间的特点,使用多种传感器,通过多模态融合技术使得 AMR 在复杂的工厂场景中实现更加灵活的定位与导航功能
项目拟开发一套适用于上汽大众车间道路环境变化情况,基于多模态感知的自主导航移动机器人(AMR)定位与导航系统。要求其定位误差不大于±10mm,并能满足1m/s速度的导航,满足上汽大众工业生产的需要,并提升AMR在生产实际中应用的可靠性。
项目成果
项目开发了一套基于多传感器融合的AMR自动机器人SLAM系统。该系统能够适应上海大众汽车工厂的复杂状况,并在此情况下达到5mm的定位精度,高于项目目标的要求,并实现长时间持续稳定工作。
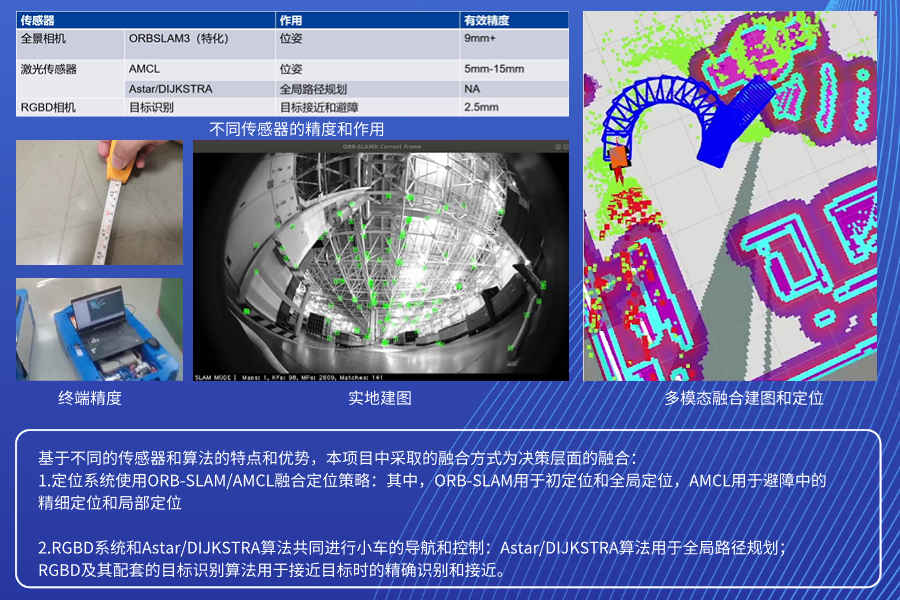
AMR采用多传感器融合的方式来实现良好的定位,导航,SLAM建图与避障工作,采用全景相机、RGBD相机、激光雷达三种传感器,其中:RGBD感知节点负责感知周围的移动障碍以及车道线等标识物,用于避障和精确定位操作;全景相机SLAM节点负责导航地图的构建,初定位以及机器人位姿跟踪;激光SLAM节点负责感知近距离的障碍,对AMR的紧急避障和方向修正进行决策。




