

面向L4无人驾驶的智能转向系统主动跟随鲁棒控制研究
机械工程资助企业:
 上海万捷汽车控制系统有限公司
上海万捷汽车控制系统有限公司
企业导师: 季强、李加良

指导教师: 吴晓东
项目成员: 骆涵,蒋双麟,徐康
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
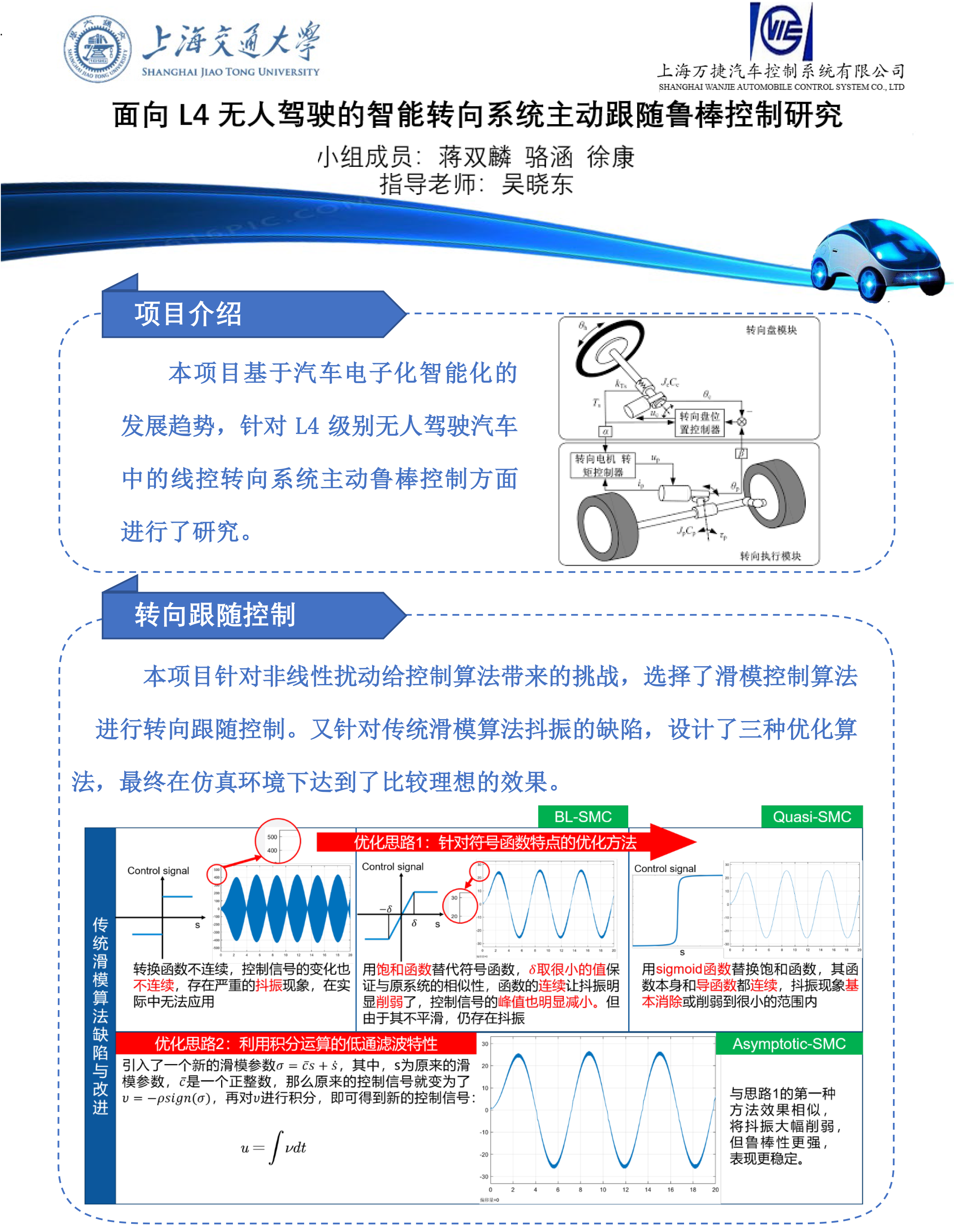
近年我国无人驾驶技术高速发展,但也存在安全性不够高以及各项技术不成熟等问题。在无人驾驶车辆中,线控转向系统相比于传统的电动助力转向,因其特有的转向器与执行器分离的特点,更适用于无人驾驶车辆。对于线控转向系统,如何在实现良好跟随性能的同时保持系统安全,是我们面临的主要挑战。本项目着眼于L4级别无人驾驶的线控转向系统,主要研究具备抵抗非线性干扰的转向跟随算法、线控转向系统的功能安全以及实验设计三大方面。
项目目标
算法设计部分,需要满足的性能指标主要有:阶跃响应下系统的超调量小于5%,调节时间小于200ms,稳态误差小于1°;正弦响应下,超调量小于5%,跟随时间小于100ms。除此之外,还有鲁棒性的要求,具体而言,在路面条件发生变化时,系统也能保持良好的跟随性能。
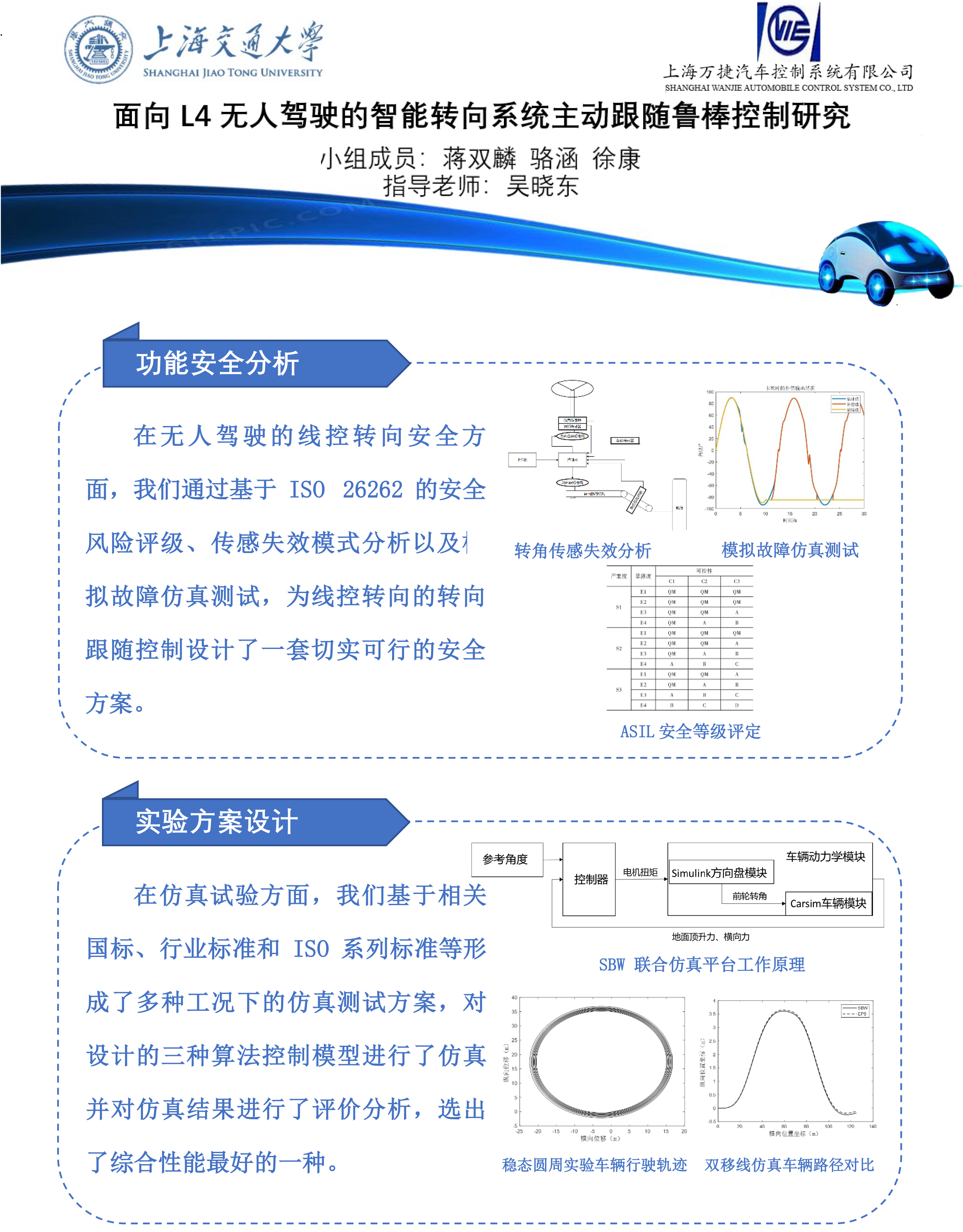
安全需求方面,针对面向自动驾驶的线控转向系统的转向跟随控制,调研行业相关的安全标准,进行功能安全分析和失效策略设计,给出一套切实可行的功能安全设计方案。
项目成果
在整个项目中,我们分别进行了转向跟随算法设计、功能安全设计、以及仿真实验验证三个方面的工作。设计了三种基于滑模理论的转向跟随算法,并进行了横向比较;功能安全部分进行了基于ASIL等级的功能安全分析和容错补偿设计。最后参考多种测试标准,设计了仿真验证实验方案,进行了软件联合仿真。整个研究过程从理论研究到具体设计,再到仿真验证,层层递进,最终形成我们的研究成果。最终能够实现较好的转向跟随效果,基本满足了客户需求。




