

面向特种设备智能巡检的地空机器人协作观测系统
机械工程资助企业:
 上海市特种设备监督检验技术研究院
上海市特种设备监督检验技术研究院
企业导师: 陈庆诚

指导教师: 董伟
项目成员: 潘达、谢以辰、史枢洋、徐培淞
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
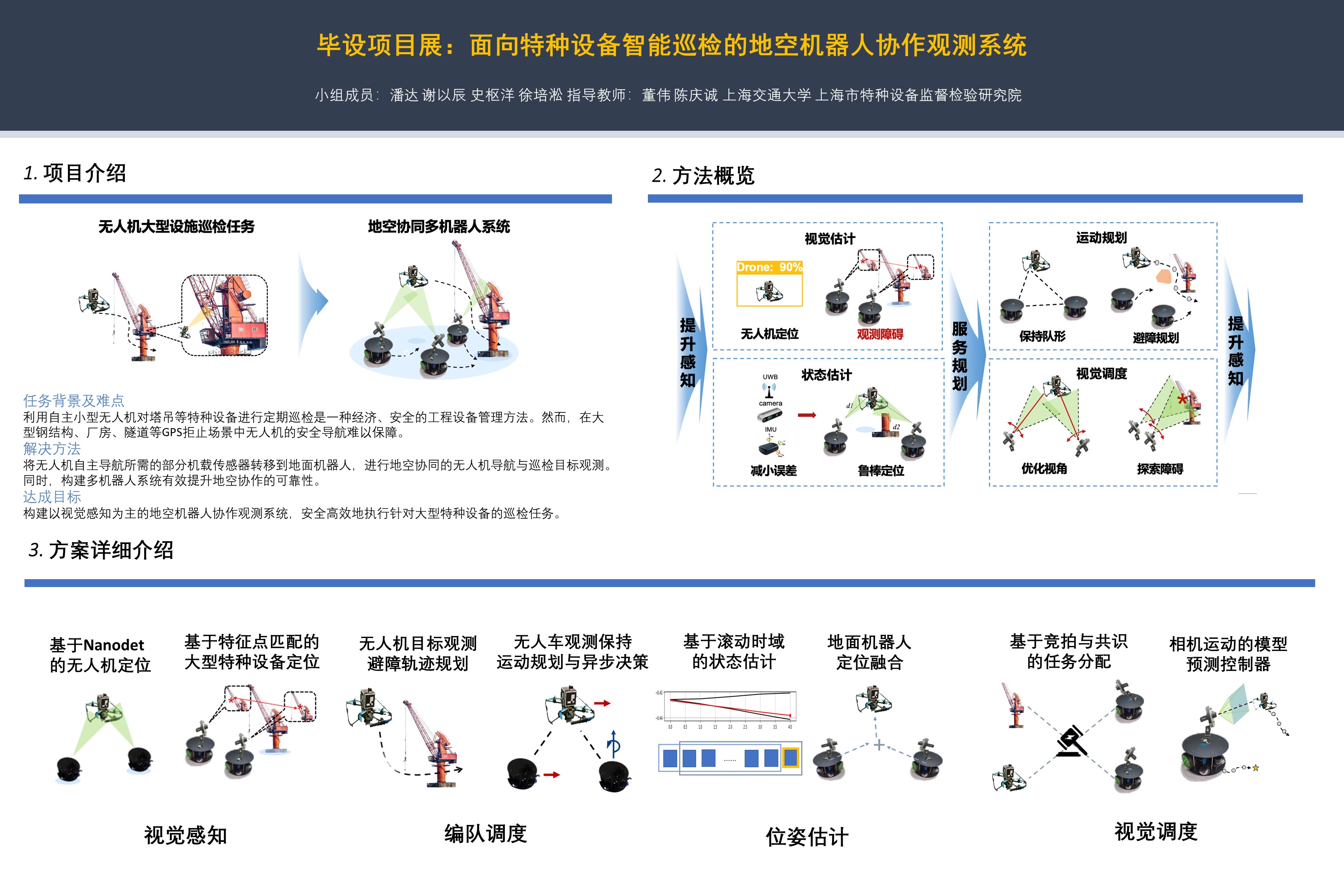
针对起重机等大型特种设备智能巡检任务,采用空中机器人巡检是一种经济、高效的设施管理手段。以机载传感器为基础的自主导航系统明显的增加了空中机器人自身的体积与质量,大幅减低其续航能力与运动敏捷特性,为解决空中机器人负载限制和自主导航稳定性问题,采用地空协同方式,将大部分机载载荷迁移至地面移动机器人端,利用视觉识别定位空中机器人。本项目拟基于主动视觉、协同观测、运动规划、多源信息融合问题展开深入探索,以期建立具有高效、敏捷作业任务能力的地空运动观测与协同规划理论方法与关键技术。
项目目标
建立地面机器人对空中机器人互观测定位技术:建立多机器人多自由度主动视觉系统运动学模型,研究基于先验特征标记的多主动视觉系统相对位姿实时解算方法。
建立机器人运动状态的多传感器信息融合方法:结合主动视觉系统观测结果,引入多传感器融合定位技术,结合视觉以外传感器提升运动状态观测精度。
建立多目标协同调度和控制技术。在研究服务于最优观测质量的协同运动优化方法,完成针对地空机器人的协作调度控制。
实现地空协同规则目标障碍物观测。在多机器人系统相对位姿解算方法基础上,引入对远处第三方规则目标单位观测与定位方法,定位目标障碍物。
项目成果
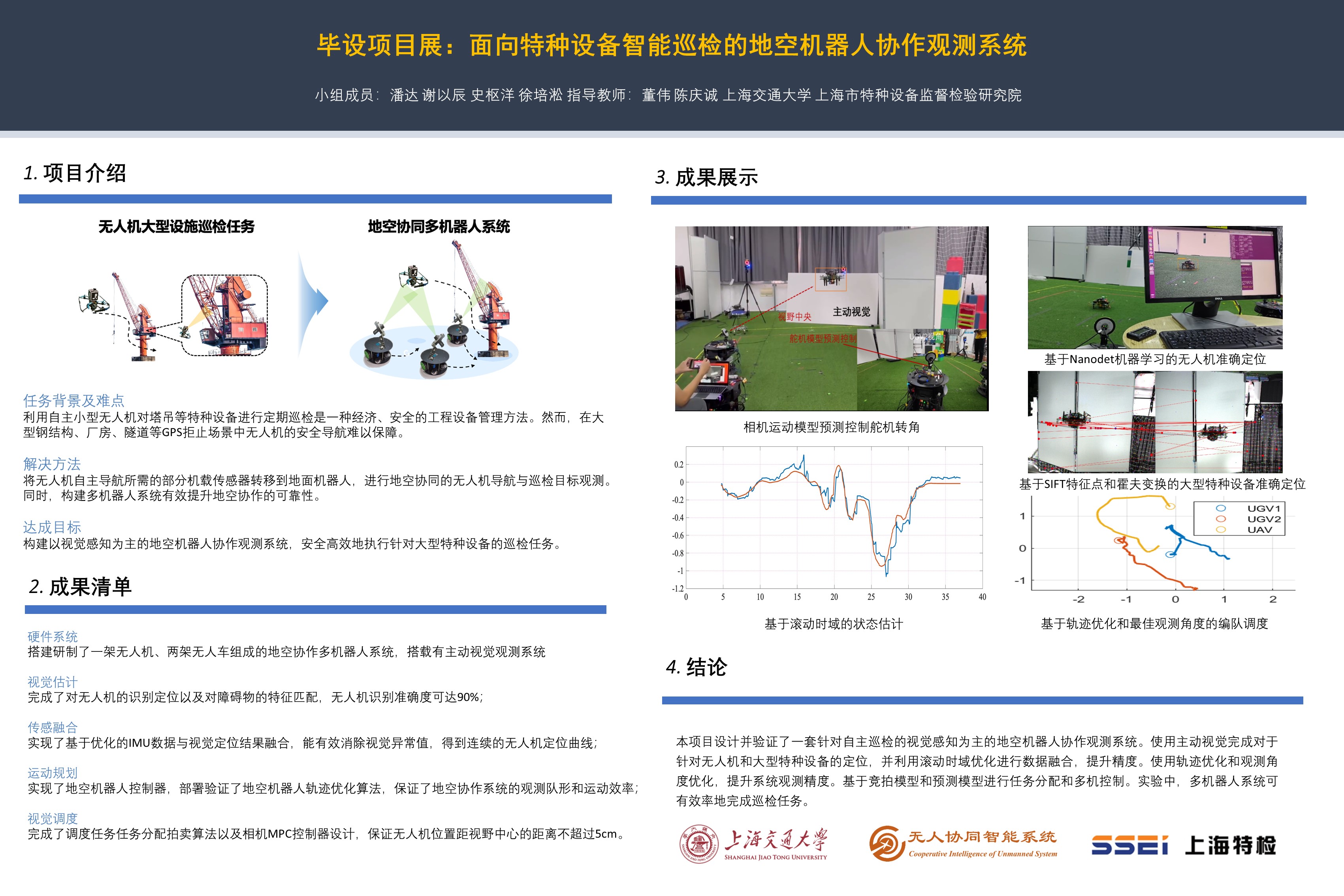
搭建研制了一架无人机、两架无人车组成的地空协作多机器人系统;并且完成了视觉估计、传感融合、运动规划、视觉调度软硬件设计。
视觉估计部分完成了对无人机的识别定位以及对障碍物的特征匹配,无人机识别准确度可达90%;
传感融合部分实现了基于优化的IMU数据与视觉定位结果融合,能有效消除视觉异常值,得到连续的无人机定位曲线;
运动规划部分实现了地空机器人控制器,并且部署验证了地空机器人轨迹优化算法,保证了地空协作系统的观测队形和运动效率;
视觉调度部分完成了调度任务的建模以及相机转角MPC控制器的设计,保证无人机位置距视野中心的距离不超过5cm。




