

基于力反馈的机械臂主从控制技术研究与应用
机械工程资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 吴俊生

指导教师: 张伟军
项目成员: 马鑫、杨子骁、张大容
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
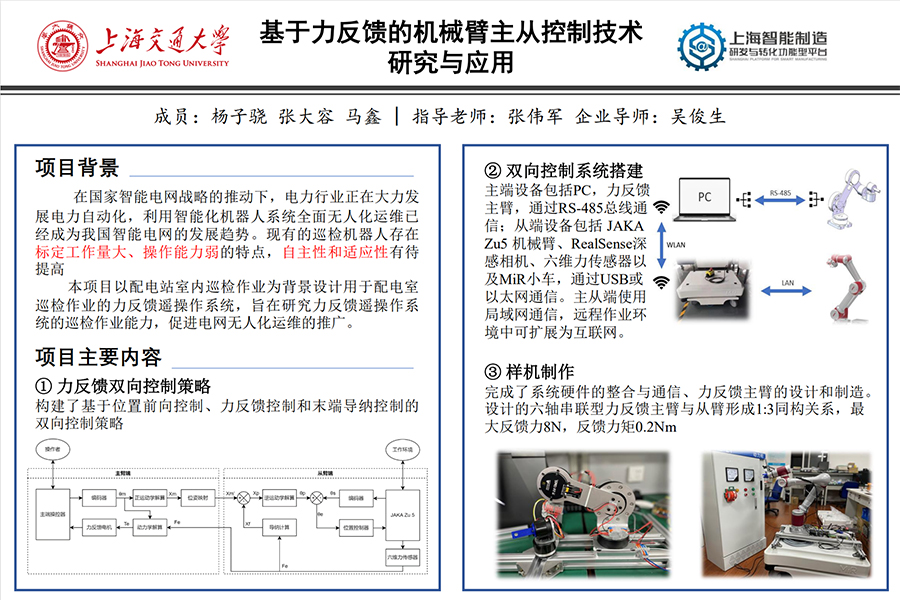
变电站巡检机器人是一种电力作业特种机器人,能够替代人力执行设备巡检、维护操作等电力运维任务,有助于实现电力设施无人化运维。现有变电站巡检机器人存在自主能力低、操作能力弱的问题,具体表现为对前期人工标定依赖性大、对环境适应性差、缺少人工干预手段和突发事故情况应对机制。为此项目组开展了基于遥操作的电力作业技术研究,引入基于力反馈的遥操作技术提升巡检操作机器人的操作能力和适应性;设计了基于深度学习的机械臂视觉引导自动趋近系统,提升机器人的自主性。
项目目标
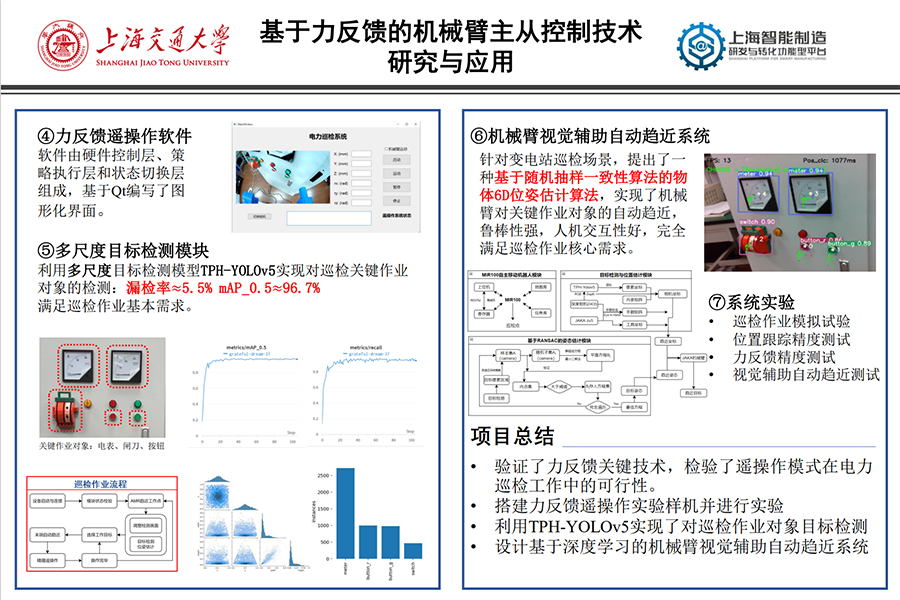
项目期望实现“机器人操作拟人化”及“人机协同可控化”的最终目标,提供遥操作沉浸感和临场感,实现操作者远程操作的人机共融一体化工作模式,减少从业者的劳动强度。通过搭建遥操作实验平台,探索遥操作模式对电力作业的可行性;设计基于深度学习的图像识别与位姿估计系统,赋予机器人对目标识别和自主趋近能力,提高巡检作业的自主性。
项目成果
初步完成变电站力反馈遥操作巡检机器人系统的设计与制作,其中包括:搭建了同构串联型六自由度遥操作平台;制定并实现了主从双向控制控制策略;编写了带人机交互界面的遥操作软件;完成了遥操作平台典型巡检作业任务试验;设计了基于深度学习的目标检测系统与基于深度相机的机械臂自动趋近系统,实现了对变电站典型作业对象的目标检测以及机械臂末端对目标作业对象的自动趋近;设计了AMR巡检控制系统,实现了AMR对指定巡检点位的自动趋近。




