

基于视觉力觉智能晶圆机器人输送系统开发
机械工程资助企业:
 上海交震半导体科技有限公司
上海交震半导体科技有限公司
企业导师: 谢磊

指导教师: 殷跃红
项目成员: 何跃齐、敬谨皓、SAMGAR BAKYTNUR
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
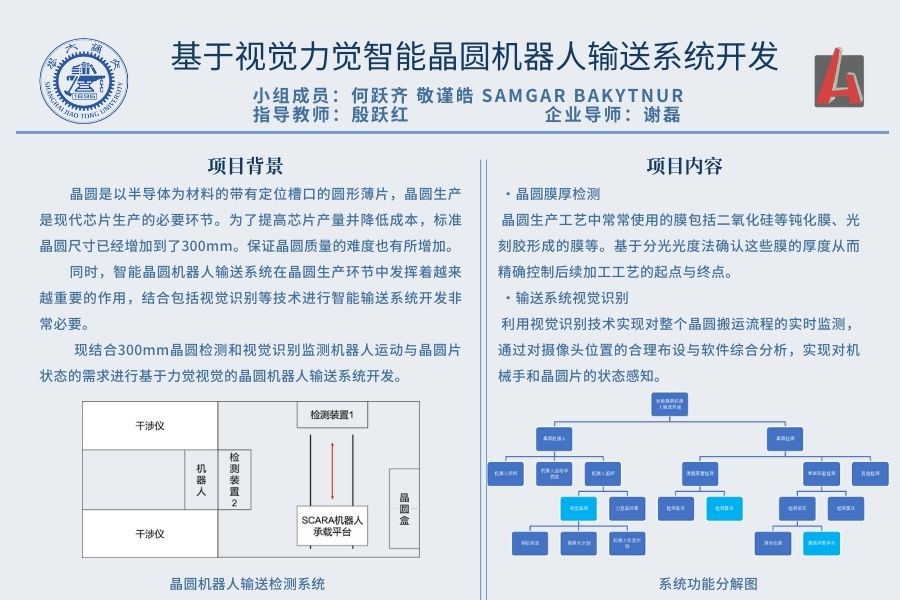
晶圆生产是现代芯片生产的必要环节,随标准晶圆尺寸不断增大,保证晶圆质量的难度也有所增加。晶圆基底上各种膜层的厚度是重点关注的对象,这些膜层厚度的微小变化极易导致产品质量不符合预期。因此,在生产过程中对膜厚进行快速、准确的检测是十分重要的。同时,随着晶圆制造的快速发展,智能晶圆机器人输送系统在晶圆生产环节中发挥着越来越重要的作用。其中,视觉识别作为目标探查、系统监控的重要手段之一,凭借其直观快捷的特点获得广泛应用。
项目目标
晶圆⽣产⼯艺中常常使⽤的膜包括⼆氧化硅等钝化膜、光刻㬵形成的膜等。基于分光光度法确认这些膜的厚度从⽽精确控制后续加⼯⼯艺的起点与终点。主要包括:设计显微分光光度计的仿真模型、设计膜厚检测软件等。同时,通过对机械臂与晶圆状态进行视觉识别,实现对机械手与晶圆片在各个工位转换时的状态监测,主要包括晶圆是否抓取、角度是否符合预期值、机械臂的运动状态等。
项目成果
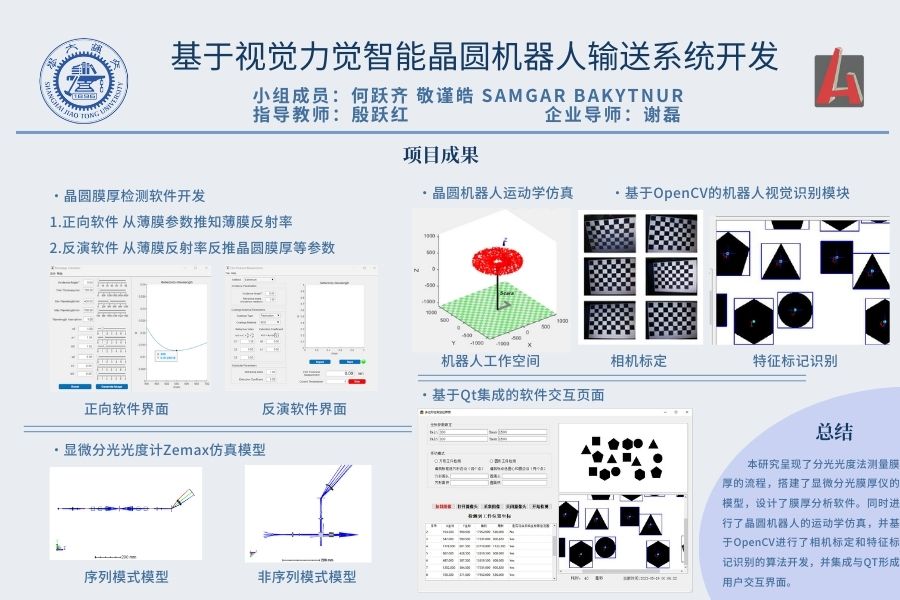
膜厚测量方面,使用了MATLAB的APP designer模块设计了两款软件,分别对理想状态膜厚测量的正向算法与逆向算法进行了初步实现;初步利用光学仿真软件Zemax搭建了显微分光光度计的仿真模型,对光源光路、显微光路和光谱仪光路进行了初步实现。
视觉识别方面,首先对企业提供的SCARA机器人进行了数学建模,运用Matlab软件对机器人进行了运动学仿真,得到了运动轨迹、运动特征和工作空间等信息。在此基础上,基于Qt和OpenCV开发了一款包含相机标定、特征标记识别、晶圆片识别功能的软件,对晶圆片状态、机械手运行状态进行了展现




