
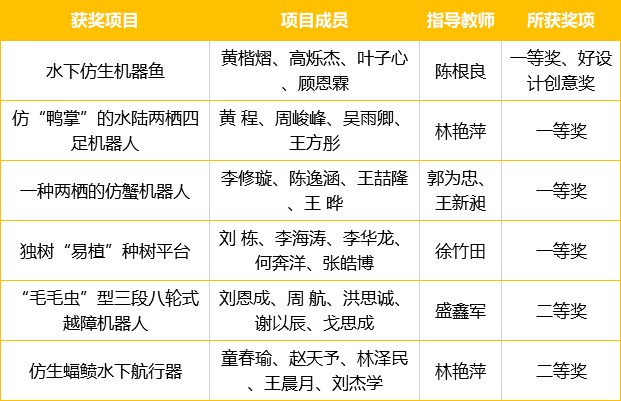
8月23日,“唯实杯”第十届全国大学生机械创新设计大赛决赛落下帷幕,suncitygroup太阳新城官网学子再创辉煌,获一等奖4项(最高奖)、二等奖2项、“好设计创意奖”1项。
上海交通大学团队在校团委的指导下,由suncitygroup太阳新城官网牵头积极备赛,举办“砺新杯”校内赛发掘、培育潜力项目,邀请专家开展数轮精心辅导。交大学子不懈努力,克服了疫情防控等重重压力,最终在全国决赛的舞台上以优秀的科创作品彰显交大风采,为母校再添荣光。
一等奖项目简介
项目名称:水下仿生机器鱼
项目成员:黄楷熠、高烁杰、叶子心、顾恩霖
指导教师:陈根良
项目介绍:


众所周知,仿生机器鱼作为水下机器人的重要组成部分,可用于海洋资源勘探、环境监测等活动。本项目以金枪鱼为原型,提出了一种仿生机器鱼的设计。其中主要设计了双弹性板耦合模型与尾鳍驱动机构,摒弃传统多级舵机控制的鱼尾,采用抗弯性能、柔性形变性能更好的弹性板作为尾部骨架,使得鱼尾摆动更真实自然,外部由柔性防水材料制作鱼皮,包络弹性板;尾鳍驱动机构则是根据差速器、斜曲柄摇杆等原理,控制两弹性板的差动,进而驱动鱼尾摆动。该装置无需改变电机运动方向,便可实现鱼尾的左右摆动,跟现在的电机直驱相比更具优势,同时能够实现鱼类的多种运动,具体包括直线运动、加速、转向等运动方式。鱼体可以作为平台搭载多种传感器,如IMU惯性测量单元与摄像头模块,可利用计算机视觉对海洋环境进行研究和监测。
项目名称:仿“鸭掌”的水陆两栖四足机器人
项目成员:黄程、周峻峰、吴雨卿、王方彤
指导教师:林艳萍
项目介绍:


项目以鸭子的脚蹼结构为仿生原型,创新设计了具有腿部-脚蹼集成机构的四足两栖机器人。其中腿部-脚蹼集成机构的脚蹼部分与腿部关节具有特定的几何关系,实现脚蹼开合前后划水;陆地行走时,脚蹼部分不会开合,不影响陆地性能。项目提出的集成设计充分利用了腿式机构对陆地非结构化环境的较高移动速率和越障性能,以及脚蹼结构对水下流体环境较高的推进性能和能量利用率,解决了水陆两栖机器人在面对水陆交界的过渡环境下运动能力不足以及因切换结构导致的效率低下等问题,提高无人平台在复杂地形下的环境适应性和运动平稳性, 使其在军事侦查、紧急救援具有广泛的应用前景。
项目名称:一种两栖的仿蟹机器人
项目成员:李修璇、陈逸涵、王喆隆、王晔
指导教师:郭为忠、王新昶
项目介绍:
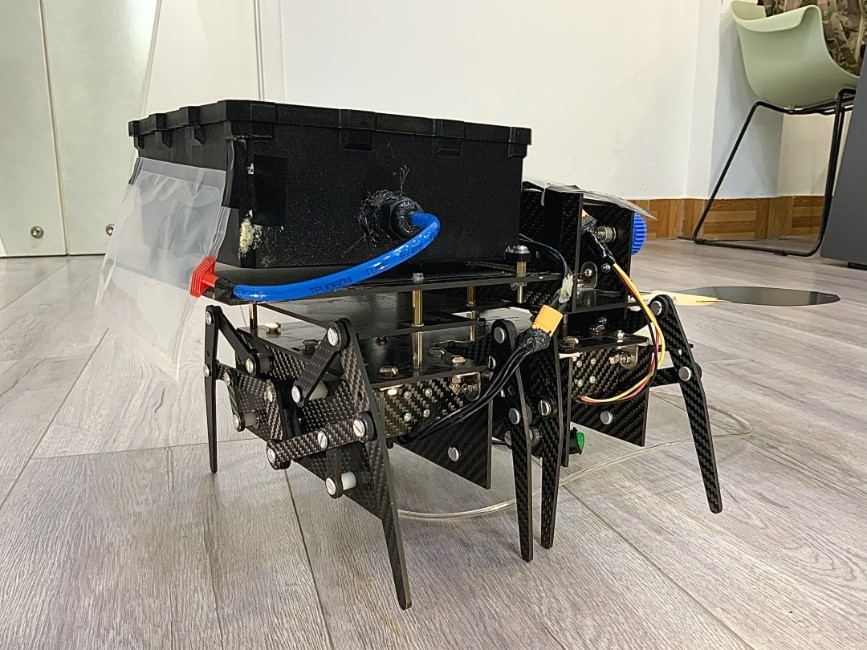
项目成员从三疣梭子蟹中汲取灵感,设计了一种具备水陆爬行和水中浮游双重特性的仿蟹机器人,其主要由陆上行动模块、水下推进模块、平衡与浮沉模块和控制模块构成。其中,陆上行动模块通过提取螃蟹步行时同对步足协同运动、相邻步足交错运动的特征,结合切比雪夫连杆机构进行设计;水下推进模块采用蹼状脚蹼交错拍动的思想,基于空间连杆机构进行设计;平衡与浮沉模块采用气囊排水法来提供浮力并平衡机器人的俯仰姿态;控制模块则基于各电子元件对其它三个模块进行控制。本作品适用于地形复杂且障碍物密集的浅滩地带,将有效助力浅滩地带的科学考察、环境监测和资源开发等。
项目名称:独树“易植”种树平台
项目成员:刘栋、李海涛、李华龙、何奔洋、张皓博
指导教师:徐竹田
项目介绍:

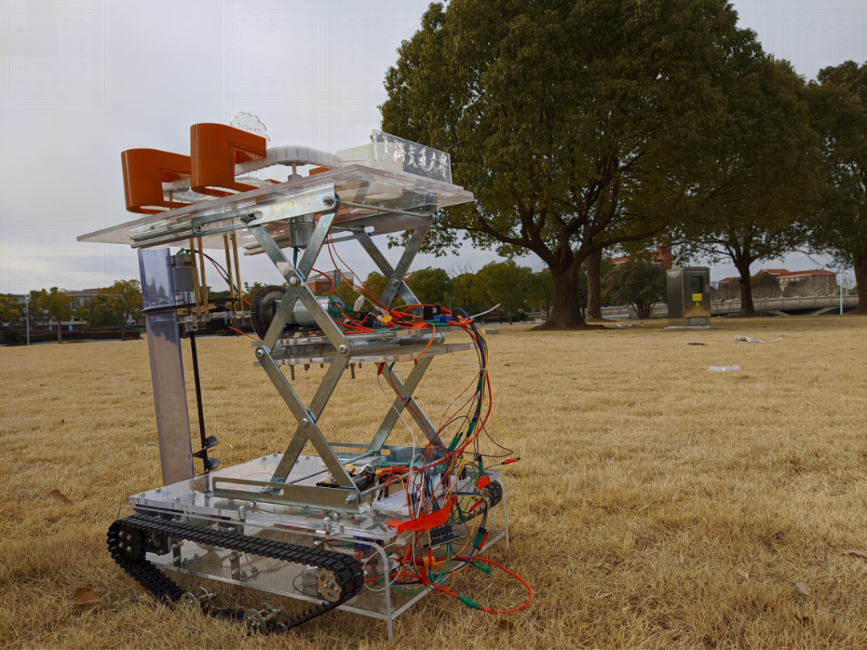
项目将种树和机械结合,采用履带移动方式,并通过平台上功能模块的安装、整合,实现开洞、送苗、培土等植树过程一体化的种树功能,减少人力资源消耗,扩大绿色覆盖面积。产品应用广泛,可用于常规植树、沙地植树等多种场景。作品主要分四大模块:移动平台采用履带移动,同时设计了双齿轮啮合模式,有效防止了旋转的脱齿运动;开洞模块采用钻的模式,通过改变钻头可以选择不同大小的树苗播种;送苗模块采用链轮传动带动送苗杯,由凸轮机构实现推苗动作,并设计了镂空式放苗杯,解决了苗落下位置的准确性;控制模块采用 ESP8266 物联网芯片,通过手机端 wifi远程控制机器。
全国大学生机械创新设计大赛自2003年教育部批示试办第一届大赛、2005年教育部组建大赛组委会至今,历经了20年、已持续举办了十届大赛。大赛的目的在于引导高等学校在教学中注重培养大学生的创新设计意识、综合设计能力与团队协作精神;加强学生动手能力的培养和工程实践的训练,提高学生针对实际需求通过创新思维,进行机械设计和工艺制作等实际工作能力;吸引、鼓励广大学生踊跃参加课外科技活动,为优秀人才脱颖而出创造条件。全国大学生机械创新设计大赛始终把培养机械创新人才和推进高校创新教育改革作为神圣使命与核心价值。
本届大赛以“自然·和谐”为主题,鼓励和引导大学生设计制作“仿生机械”和“自然修复机械”,倡导大学生主动认识大自然中的动物和其活动规律,以所学所创保护环境,与自然和谐共处。本届大赛共吸引来自704所高校的5415项作品参赛,最终有200项作品进入全国决赛,代表了全国参赛作品的最高水平。
